
Contact Us

Attitude sensor
Product Model:
MNS301E
Product Introduction
The MNS301E attitude sensor consists of a MEMS three‑axis gyroscope and a three‑axis accelerometer. After full‑temperature range calibration, the inertial sensors can meet performance requirements under various conditions. The product leverages a unique built‑in attitude algorithm to provide carriers with stable and reliable attitude information, as well as angular rate and linear acceleration data. It boasts advantages such as small size, low power consumption, high reliability, and stable performance. This product is suitable for attitude control in applications including vehicle-mounted, airborne, and shipborne systems.
Performance Metrics
| Spinning top | Accelerometer | System Features | ||||||
| Range | ± 450 | ° /s | Range | ± 10 | g | Supply voltage | 5 ± 0.2 | V |
| Zero Bias Stability | ≤ 10 | ° /h | Zero bias | ≤5 | mg | Power Consumption | ≤2 | W |
| Zero bias repeatability | ≤ 10 | ° /h | Zero Bias Stability | ≤0.2 | mg | Interface Type | RS422 | -- |
| Nonlinear scale factor | ≤50 | ppm | Zero bias repeatability | ≤0.2 | mg | Data update rate | 200 (up to 500) | Hz |
| Random Walk with Random Angles | ≤0.2 | ° /√h | Nonlinear scale factor (within ±1g) | ≤150 | ppm | Baud rate | 115200 default | bits per second |
| Roll/Pitch | Operating temperature range | ~45~+85 | ° C | |||||
| Static | ≤0.1 | ° | Storage temperature range | ~50~+85 | ° C | |||
| Dynamic | ≤0.3 | ° | Weight | ≤75 | g | |||
| Heading | Connector | J30J-15ZKP | -- | |||||
| Heading Drift @1min | ≤0.2 | ° | ||||||
Application Fields

● Airborne Domain: Payload Stabilization, Unmanned Aerial Vehicles
● Land-based applications: precision agriculture, mobile communications in motion
● Marine Infrastructure Domain: Underwater Unmanned Platforms, Ship Positioning, Communication‑Enabled Unmanned Vessels
Main Dimensions and Interface Definitions
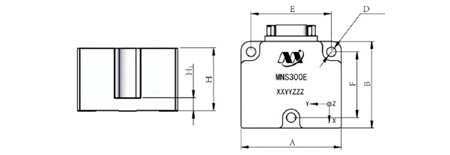
| External dimensions | |
| Code | Value (mm) |
| A | 44.8 ± 0.5 |
| B | 38.6 + 0.5 |
| D | φ4.2+0.1 |
| E | 35.9 + 0.2 |
| F | 29.3±0.2 |
| H | 28 ± 0.5 |
| H1 | 5.8 ± 0.3 |
| H2 | 5.8 ± 0.3 |
| Output Interface Wiring Definitions | ||
| Pin Number | Definition | Explanation |
| 1 | +5V | Power positive |
| 2 | GND | Power ground |
| 3 | RS422_TX_P | RS422 transmit positive |
| 4 | RS422_TX_N | RS422 negative transmission |
| 5 | RS422_RX_P | RS422 receive positive |
| 6 | RS422_RX_N | RS422 receives negative. |
| 7 | AUX_RS232_TXA | Extend serial port output |
| 8 | AUX_RS232_RXA | Expand Serial Port Input |
| 9 | SGND | Signal ground |
| 10 | N/A | N/A |
Consultation
For inquiries about products or sales, please contact us.
