
Contact Us

INS
Product Model:
MNV420A
Product Introduction
The MNV420A is a compact, GNSS/INS integrated, cost‑effective combined navigation system that features a high‑precision GNSS module and a tactical‑grade IMU. By interfacing with vehicle CAN wheel speed data, it can handle challenging environments such as complex urban obstructions and highway signal interference, providing continuous, stable, and reliable positioning, velocity, attitude, and time information for intelligent vehicle applications.
Performance Metrics
Test conditions: Room temperature (23 ± 2°C)
| Spinning top | Accelerometer | System | ||||||
| Measurement range | ±450 | °/s | Measurement range | ±10 | g | Roll/Pitch | ≤0.05 | ° |
| Zero Bias Stability | ≤10 | °/h | Zero Bias Stability | ≤0.2 | mg | Heading | ≤0.1 | ° |
| Nonlinear scale factor | ≤50 | ppm | Nonlinear scale factor | ≤200 | ppm | Location | ≤1.5 m (single point) | -- |
| Random Walk with Random Angles | ≤0.25 | °√h | Rate Random Walk | ≤0.02 | m/s/√h | ≤2 cm + 1 ppm (RTK) | ||
| GNSS receiver | Speed accuracy | ≤0.03 | m/s | |||||
| Frequency point | BDS B1/B2; GPS L1/L2; | -- | GNSS Lock Loss Position Drift @10s | ≤0.3 | m | |||
| GLONALL L1/L2; | GNSS signal loss and position drift @ 1 km/2 min | ≤0.2 (odometer-assisted) | % | |||||
| Galileo E1/E5b | GNSS Loss of Lock Heading Drift @1min | ≤0.15 | ° | |||||
| Positional Accuracy (1σ) | ≤1.5 m (single point) | System Features | ||||||
| ≤2 cm + 1 ppm (RTK) | Supply voltage | 9–24 | v | |||||
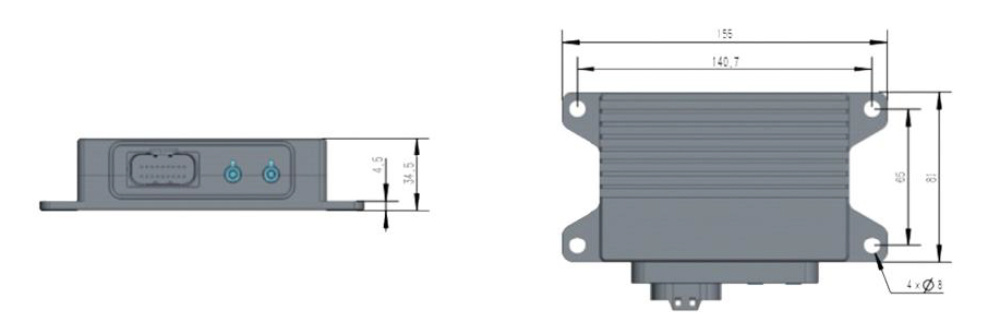
| Speed Accuracy (1σ) | ≤0.03 | m/s | Size | 155*81*34.5 | mm | |||
| Weight | ≤415 | g | ||||||
| Course accuracy (1σ) | ≤0.2 / 1m baseline | ° | Interface Type | RS422/CAN | -- | |||
| Data update rate | 100/200 | Hz | ||||||
| Heading Accuracy (1σ) (INS/GNSS Combined Data) | ≤0.08/baseline 2m | ° | Baud rate | RS422, 230400 | bits per second | |||
| CAN, 500K | ||||||||
Application Fields

● Autonomous vehicles, unmanned helicopters, and fixed-wing autonomous navigation vehicles
● Platform Stability and Calibration: Precision Agriculture on the Move
● Inertial Measurement Systems for Ships and Underwater Robots
Outline Dimensions and Wiring Definitions
| PIN angle | Signal Name | PIN angle | Signal Name |
| 1 | CAN2_L | 10 | 1PPS |
| 2 | CAN2_H | 11 | -- |
| 3 | CAN1_L | 12 | GND |
| 4 | CAN1_H | 13 | -- |
| 5 | GNSS_DIFF_TXD | 14 | RS422 R+ |
| 6 | GNSS_DIFF_RXD | 15 | -- |
| 7 | GND | 16 | RS422 R- |
| 8 | Power ground | 17 | RS422 T+ |
| 9 | Power positive | 18 | RS422 T- |
Consultation
For inquiries about products or sales, please contact us.
